PrefixSpan算法原理
前面我们讲到频繁项集挖掘的关联算法Apriori和FP Tree。这两个算法都是挖掘频繁项集的。而今天我们要介绍的PrefixSpan算法也是关联算法,但是它是挖掘频繁序列模式的,因此要解决的问题目标稍有不同。
1. 项集数据和序列数据
首先我们看看项集数据和序列数据有什么不同,如下图所示。
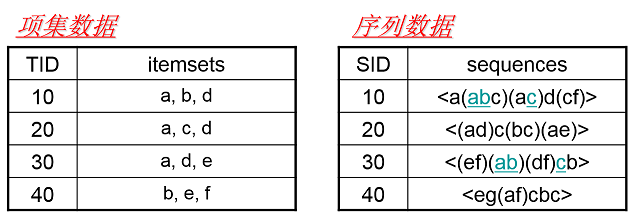
左边的数据集就是项集数据,在Apriori和FP Tree算法中我们也已经看到过了,每个项集数据由若干项组成,这些项没有时间上的先后关系。而右边的序列数据则不一样,它是由若干数据项集组成的序列。比如第一个序列<a(abc)(ac)d(cf)>,它由a,abc,ac,d,cf共5个项集数据组成,并且这些项有时间上的先后关系。对于多于一个项的项集我们要加上括号,以便和其他的项集分开。同时由于项集内部是不区分先后顺序的,为了方便数据处理,我们一般将序列数据内所有的项集内部按字母顺序排序。
2. 子序列与频繁序列
了解了序列数据的概念,我们再来看看上面是子序列。子序列和我们数学上的子集的概念很类似,也就是说,如果某个序列A所有的项集在序列B中的项集都可以找到,则A就是B的子序列。当然,如果用严格的数学描述,子序列是这样的:
对于序列和序列,如果存在数字序列, 满足,则称A是B的子序列。当然反过来说, B就是A的超序列。
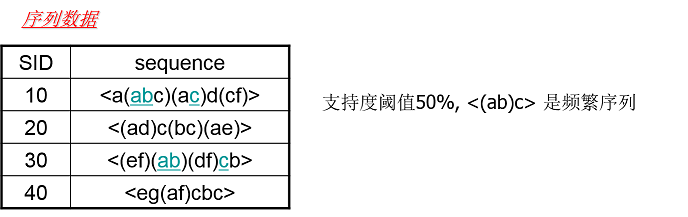
而频繁序列则和我们的频繁项集很类似,也就是频繁出现的子序列。比如对于下图,支持度阈值定义为50%,也就是需要出现两次的子序列才是频繁序列。而子序列<(ab)c>是频繁序列,因为它是图中的第一条数据和第三条序列数据的子序列,对应的位置用蓝色标示。
3. PrefixSpan算法的一些概念
PrefixSpan算法的全称是Prefix-Projected Pattern Growth,即前缀投影的模式挖掘。里面有前缀和投影两个词。那么我们首先看看什么是PrefixSpan算法中的前缀prefix。
在PrefixSpan算法中的前缀prefix通俗意义讲就是序列数据前面部分的子序列。如果用严格的数学描述,前缀是这样的:对于序列和序列,满足,而,则称A是B的前缀。比如对于序列数据B=<a(abc)(ac)d(cf)>,而A=<a(abc)a>,则A是B的前缀。当然B的前缀不止一个,比如<a>, <aa>, <a(ab)> 也都是B的前缀。
看了前缀,我们再来看前缀投影,其实前缀投影这儿就是我们的后缀,有前缀就有后缀嘛。前缀加上后缀就可以构成一个我们的序列。下面给出前缀和后缀的例子。对于某一个前缀,序列里前缀后面剩下的子序列即为我们的后缀。如果前缀最后的项是项集的一部分,则用一个“_”来占位表示。
下面这个例子展示了序列<a(abc)(ac)d(cf)>的一些前缀和后缀,还是比较直观的。要注意的是,如果前缀的末尾不是一个完全的项集,则需要加一个占位符。
在PrefixSpan算法中,相同前缀对应的所有后缀的结合我们称为前缀对应的投影数据库。

4. PrefixSpan算法思想
现在我们来看看PrefixSpan算法的思想,PrefixSpan算法的目标是挖掘出满足最小支持度的频繁序列。那么怎么去挖掘出所有满足要求的频繁序列呢。回忆Aprior算法,它是从频繁1项集出发,一步步的挖掘2项集,直到最大的K项集。PrefixSpan算法也类似,它从长度为1的前缀开始挖掘序列模式,搜索对应的投影数据库得到长度为1的前缀对应的频繁序列,然后递归的挖掘长度为2的前缀所对应的频繁序列,。。。以此类推,一直递归到不能挖掘到更长的前缀挖掘为止。
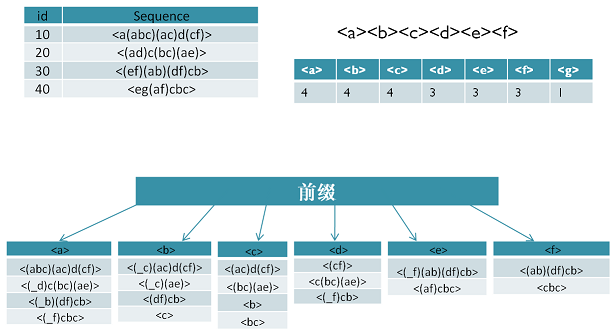
比如对应于我们第二节的例子,支持度阈值为50%。里面长度为1的前缀包括<a>, <b>, <c>, <d>, <e>, <f>,<g>我们需要对这6个前缀分别递归搜索找各个前缀对应的频繁序列。如下图所示,每个前缀对应的后缀也标出来了。由于g只在序列4出现,支持度计数只有1,因此无法继续挖掘。我们的长度为1的频繁序列为<a>, <b>, <c>, <d>, <e>,<f>。去除所有序列中的g,即第4条记录变成<e(af)cbc>
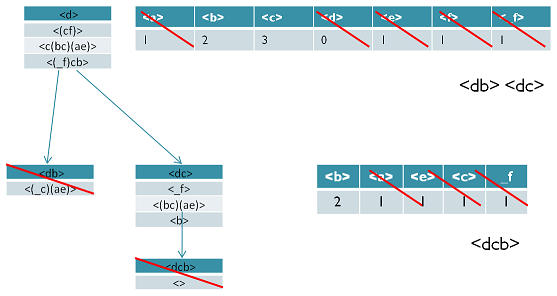
现在我们开始挖掘频繁序列,分别从长度为1的前缀开始。这里我们以d为例子来递归挖掘,其他的节点递归挖掘方法和D一样。方法如下图,首先我们对d的后缀进行计数,得到{a:1, b:2, c:3, d:0, e:1, f:1,_f:1}。注意f和_f是不一样的,因为前者是在和前缀d不同的项集,而后者是和前缀d同项集。由于此时a,d,e,f,_f都达不到支持度阈值,因此我们递归得到的前缀为d的2项频繁序列为<db>和<dc>。接着我们分别递归db和dc为前缀所对应的投影序列。首先看db前缀,此时对应的投影后缀只有<_c(ae)>,此时_c,a,e支持度均达不到阈值,因此无法找到以db为前缀的频繁序列。现在我们来递归另外一个前缀dc。以dc为前缀的投影序列为<_f>, <(bc)(ae)>, <b>,此时我们进行支持度计数,结果为{b:2, a:1, c:1, e:1, _f:1},只有b满足支持度阈值,因此我们得到前缀为dc的三项频繁序列为<dcb>。我们继续递归以<dcb>为前缀的频繁序列。由于前缀<dcb>对应的投影序列<(_c)ae>支持度全部不达标,因此不能产生4项频繁序列。至此以d为前缀的频繁序列挖掘结束,产生的频繁序列为<d><db><dc><dcb>。
同样的方法可以得到其他以<a>, <b>, <c>, <e>, <f>为前缀的频繁序列。
5. PrefixSpan算法流程
下面我们对PrefixSpan算法的流程做一个归纳总结。
输入:序列数据集S和支持度阈值
输出:所有满足支持度要求的频繁序列集
1)找出所有长度为1的前缀和对应的投影数据库
2)对长度为1的前缀进行计数,将支持度低于阈值的前缀对应的项从数据集S删除,同时得到所有的频繁1项序列,i=1.
3)对于每个长度为i满足支持度要求的前缀进行递归挖掘:
a) 找出前缀所对应的投影数据库。如果投影数据库为空,则递归返回。
b) 统计对应投影数据库中各项的支持度计数。如果所有项的支持度计数都低于阈值,则递归返回。
c) 将满足支持度计数的各个单项和当前的前缀进行合并,得到若干新的前缀。
d) 令i=i+1,前缀为合并单项后的各个前缀,分别递归执行第3步。
6. PrefixSpan算法小结
PrefixSpan算法由于不用产生候选序列,且投影数据库缩小的很快,内存消耗比较稳定,作频繁序列模式挖掘的时候效果很高。比起其他的序列挖掘算法比如GSP,FreeSpan有较大优势,因此是在生产环境常用的算法。
PrefixSpan运行时最大的消耗在递归的构造投影数据库。如果序列数据集较大,项数种类较多时,算法运行速度会有明显下降。因此有一些PrefixSpan的改进版算法都是在优化构造投影数据库这一块。比如使用伪投影计数。
当然使用大数据平台的分布式计算能力也是加快PrefixSpan运行速度一个好办法。比如Spark的MLlib就内置了PrefixSpan算法。